
What is an RTOS and Why Does It Matter in Embedded Systems?
- Amisha Patil
- 1 day ago
- 7 min read

Introduction
If you've spent any time in the embedded systems world, you've almost certainly heard the term RTOS. It comes up in job descriptions, datasheets, technical forums, and design reviews. But what exactly is an RTOS? Why do engineers choose it over simpler approaches? And when does it actually matter?
In this post, we'll go deep — covering what an RTOS is, how it works under the hood, why it's critical in embedded systems, and how to decide whether your project needs one.

What is an RTOS?
RTOS stands for Real-Time Operating System. It is a specialized operating system designed to process data and execute tasks within strict, predictable time constraints.
The key word here is real-time — and this is often misunderstood. Real-time does not mean fast. It means deterministic — the system must respond to events within a guaranteed, bounded time window, every single time, without exception.
A general-purpose OS like Linux or Windows is optimized for throughput and fairness — it tries to give all applications a fair share of CPU time. An RTOS, on the other hand, is optimized for predictability and timing guarantees — ensuring that the most critical tasks always run exactly when they need to.
Real-Time vs. General-Purpose OS
Feature | General-Purpose OS | RTOS |
Primary Goal | Throughput & fairness | Determinism & timing |
Scheduling | Best-effort | Priority-based, preemptive |
Latency | Variable (ms to seconds) | Bounded (µs to ms) |
Footprint | Large (GBs of RAM) | Tiny (KB to MB) |
Examples | Linux, Windows, macOS | FreeRTOS, Zephyr, VxWorks, ThreadX |
Use Cases | Laptops, servers, phones | MCUs, PLCs, medical devices, automotive ECUs |
Core Concepts of an RTOS
To truly understand an RTOS, you need to understand its building blocks.
1. Tasks (Threads)
In an RTOS, the work is divided into tasks (sometimes called threads). Each task is an independent unit of execution with its own stack, priority level, and state. Tasks can be in one of the following states:
Running — currently executing on the CPU
Ready — waiting to run, all conditions met
Blocked — waiting for a resource, event, or timer
Suspended — explicitly paused by the application
At any given time, only one task runs on a single-core MCU. The RTOS decides which task gets CPU time based on priorities.
2. The Scheduler
The scheduler is the heart of the RTOS. It decides which task runs at any given moment. Most RTOSes use a preemptive priority-based scheduler, which works like this:
Every task is assigned a priority (e.g., 0 = lowest, 31 = highest)
The scheduler always runs the highest-priority ready task
If a higher-priority task becomes ready, it immediately preempts (interrupts) the currently running lower-priority task
This guarantees that critical tasks are never starved by less important ones.
3. Context Switching
When the scheduler switches from one task to another, it performs a context switch. This involves:
Saving the current task's CPU registers, stack pointer, and program counter
Loading the saved state of the next task
Resuming execution of the new task
Context switches happen extremely fast — typically in microseconds — and are the mechanism that allows an RTOS to appear as though multiple tasks are running simultaneously.
4. Inter-Task Communication
Tasks often need to share data or signal each other. An RTOS provides several mechanisms for this:
Queues — A FIFO buffer used to pass messages between tasks. A sensor task can push readings into a queue; a processing task pulls from it.
Semaphores — A signaling mechanism used for synchronization. A binary semaphore signals that an event has occurred. A counting semaphore tracks a pool of resources.
Mutexes (Mutual Exclusion) — Used to protect shared resources. Only one task can hold a mutex at a time, preventing data corruption from concurrent access.
Event Flags / Event Groups — Allow tasks to wait for one or more events simultaneously, useful for coordinating complex sequences.
5. Timers
RTOS timers allow tasks or callbacks to be executed after a specific delay or at periodic intervals — without blocking the CPU. This is essential for timeouts, periodic sampling, and watchdog mechanisms.
Types of Real-Time Systems
Not all real-time systems have the same requirements. There are three categories:
Hard Real-Time
Missing a deadline is a catastrophic failure. The system must respond within a guaranteed time, always.
Examples: Airbag deployment, pacemakers, fly-by-wire aircraft control, anti-lock braking systems (ABS)
Firm Real-Time
Missing a deadline occasionally is tolerable but degrades quality. Late results are useless but not dangerous.
Examples: Video streaming, multimedia playback, industrial process control
Soft Real-Time
Deadlines are targets, not strict requirements. Occasional misses reduce performance but don't cause failure.
Examples: Email clients, web browsers, general data logging
An RTOS is most critical for hard real-time systems, but it is widely used in firm real-time applications as well.
Why Does an RTOS Matter in Embedded Systems?
Managing Complexity
Modern embedded systems are not simple. A single IoT device might simultaneously need to:
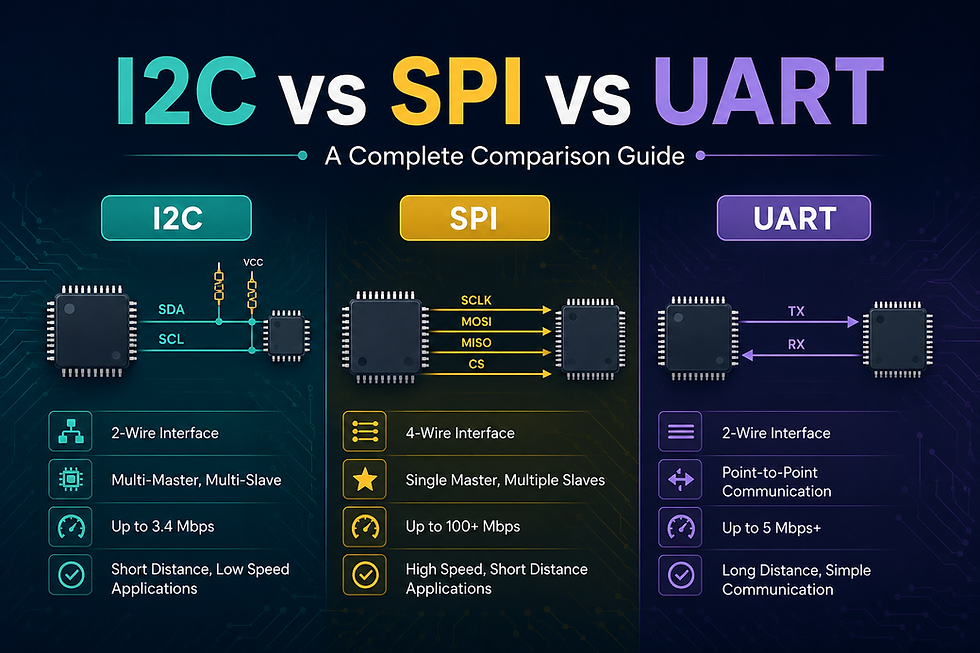
Read sensors via I2C every 10ms
Handle UART communication with a GPS module
Manage a BLE connection
Run a PID control loop at 1kHz
Log data to flash memory
Monitor battery voltage
Doing all of this in a bare-metal super-loop becomes increasingly fragile and unmanageable as complexity grows. An RTOS lets you split these responsibilities into separate, independently testable tasks.
Guaranteed Response Time
In bare-metal programming, a time-critical interrupt handler may get delayed if another part of the code is running. In an RTOS, you can assign high priority to critical tasks and guarantee that they will always preempt lower-priority work within a known time window.
Better Code Organization
RTOS tasks map naturally to real-world system responsibilities. Each task has a clear job, its own data, and clean interfaces to other tasks via queues and semaphores. This makes code far easier to read, maintain, and scale.
Simplified Blocking Operations
In bare-metal code, waiting for a sensor response or a communication ACK usually means either busy-waiting (wasting CPU cycles) or building complex state machines. In an RTOS, a task can simply block — the scheduler suspends it and runs other tasks in the meantime, resuming it automatically when the wait condition is met.
Power Management
Many RTOSes support tickless idle mode — when no tasks are ready to run, the CPU enters a low-power sleep state and wakes only when needed. This is critical for battery-powered IoT devices.
Popular RTOS Options
FreeRTOS
The most widely used RTOS in the embedded world. Open-source, MIT licensed, extremely well-documented, and supported on hundreds of microcontrollers including ESP32, STM32, and NXP. An excellent starting point for most projects.
Zephyr RTOS
A modern, Linux Foundation-backed RTOS with strong IoT support, built-in networking stacks (BLE, Thread, Zigbee, Wi-Fi), and a powerful device tree build system. Growing rapidly in the industry.
VxWorks
A commercial RTOS used in safety-critical industries — aerospace, defense, automotive. Known for its rock-solid reliability and DO-178C / IEC 61508 certifications.
Azure RTOS (ThreadX)
Microsoft's RTOS, now open-sourced. Known for its extremely small footprint and fast context switch times. Popular in industrial and medical devices.
RTEMS
Open-source, used extensively in aerospace and scientific applications including NASA missions.
RTOS vs. Bare-Metal: When to Choose What?
An RTOS is not always the right answer. Here's a practical guide:
Choose bare-metal when:
Your application has a single, simple task
Timing requirements are loose or handled by hardware timers
You're working with very low-end MCUs (< 8KB RAM)
Minimum latency with no overhead is critical (hard ISR-driven systems)
Choose an RTOS when:
You have multiple concurrent tasks with different timing requirements
Tasks need to communicate and synchronize
You need built-in power management
Code maintainability and scalability matter
You're building a product that will evolve over time
A Simple Example: Bare-Metal vs. RTOS
Bare-Metal Super-Loop
while (1) {
read_sensor(); // takes 5ms
process_data(); // takes 10ms
send_uart(); // takes 3ms
check_buttons(); // must respond within 1ms — but gets delayed!
}
The button check is buried inside a loop. If process_data() takes longer than expected, the button response is delayed — unpredictably.
With FreeRTOS
// High priority task — runs every 1ms
void button_task(void *pvParameters) {
while (1) {
check_buttons();
vTaskDelay(pdMS_TO_TICKS(1));
}
}
// Medium priority task — runs every 10ms
void sensor_task(void *pvParameters) {
while (1) {
read_sensor();
process_data();
vTaskDelay(pdMS_TO_TICKS(10));
}
}
// Low priority task — runs every 50ms
void uart_task(void *pvParameters) {
while (1) {
send_uart();
vTaskDelay(pdMS_TO_TICKS(50));
}
}
Now button_task always runs at 1ms intervals, regardless of what the other tasks are doing. Timing is predictable and guaranteed.
Common Pitfalls When Using an RTOS
Priority Inversion
A high-priority task gets blocked because a low-priority task holds a resource it needs. Solution: use priority inheritance mutexes, which most RTOSes support.
Stack Overflow
Each task needs its own stack. If you allocate too little, the stack overflows silently — causing hard faults or unpredictable behavior. Always profile your stack usage carefully.
Deadlock
Two tasks each wait for a resource held by the other — both freeze indefinitely. Design your resource acquisition order carefully to avoid circular dependencies.
Overuse of Queues
Passing large structs through queues increases copy overhead. Use queues for pointers or small messages; use shared memory with mutexes for large data.
Key Metrics of an RTOS
When evaluating or benchmarking an RTOS for your project, these are the metrics that matter:
Metric | What It Means |
Context Switch Time | How fast the scheduler switches between tasks |
Interrupt Latency | Time from interrupt trigger to ISR execution |
Task Response Time | Worst-case delay from event to task execution |
Memory Footprint | RAM and flash consumed by the RTOS kernel |
Jitter | Variation in task execution timing |
For hard real-time systems, worst-case values matter far more than average values.
Conclusion
An RTOS is not just a software library it is a fundamental architectural decision that shapes how your embedded system is designed, tested, and maintained. It brings structure, predictability, and scalability to systems that would otherwise become tangled webs of interrupt flags and global state.
For simple projects, bare-metal is perfectly fine. But as your system grows in complexity, task count, and timing requirements, an RTOS becomes not just useful it becomes essential.
Understanding the RTOS deeply its scheduler, its primitives, its trade-offs is one of the most valuable skills an embedded engineer can develop. It is the difference between a system that works most of the time and one that works every time, exactly when it needs to.

Comments